
Join Steve Dashew aboard FPB 78-1 Cochise and find out how the Dashews solved one of the major weaknesses of modern integrated navigation systems.
We have previously discussed in detail the evolution and refinement of the Matrix deck layout aboard Cochise (which you can read about here).
Over the past year we have concentrated mostly on videos, turning to the visual realm to give you some insight into the evolution of our designs and how these have worked out for us in the real cruising world (there are currently 68 videos on the Dashew Offshore YouTube channel).
But now it’s time to switch back to the written word. We want to explain a bit about how our thinking and hardware have evolved about modern electronics, making it possible for us to operate Cochise on our own, particularly in difficult situations.
Cochise is fitted with the first integrated navigation solution we have ever used. Major components all come from the same supplier, SIMRAD, and can be managed over a common network. There are two radars, autopilot (plus backup), several GPS’s, a depth sounder, forward-looking sonar and structure scan all within the same system.
Cochise also has the most extensive N2K data monitoring system we have ever fitted. Pumps, float switches, tank levels, engine data, electrical info and many other parameters are constantly tracked. There are numerous custom pages of information optimized for various situations. And she has a FLIR night vision system, as well as multiple video cameras used to keep eyes on the engine room, for on-deck surveillance, and to track and record weather and sea state. All good stuff, much of it vying for the watch keeper’s attention.
During the first 18,000 miles of cruising we had Steve Parsons, a professional captain, with us, and our watch-keeping duties were split between the Matrix deck and great room. Though having Steve on board was a great addition and we worked well together, we did chafe at the thought that we were now of a certain maturity which made the extra assistance prudent…

…We quickly learned that the 55″ TV in the great room was a critical component of our combined watch-keeping efforts. The screen was easily discernible from anywhere in the great room, and there was lots of space in which to arrange navigation and/or N2K vessel data. In addition, the low vertical installation reduced screen glare on the windows and surrounding surfaces. We were constantly experimenting with combinations of screen setups: 32″ wide screen monitors, 5″ square Maretron N2K data displays, and occasionally dedicated processor/display combinations. We also had the ability to run the Simrad nav system as well as Maretron N2K software on both iPad and Samsung tablets. Lots of options. Offshore, with infinite room and plenty of time, things felt good. Certainly compared to our previous yachts the data presentation and the working arrangement related to the Simrad gear was an improvement.

We are all creatures of habit to a greater or lesser degree. In the design fields this manifests itself in the fact that it is usually more comfortable to do what’s worked before, rather than risk something new. Established norms, even if they are your own and differ from the public at large, are difficult to break away from. Although we constantly battle this state of affairs, the FPB 78 Matrix deck with which Cochise was launched is a classic example of what I am trying to describe. We had stayed with our somewhat tried and true layout from earlier setups, increased in size to take advantage of the increased space.
Having learned the advantages of the advantages of a large, low-mounted screen from using the TV in the great room, using Cochise on our own eventually evolved into four screens on the Matrix deck over a year of experimenting. Each of these has a hinge running along the upper section, which allows the screen to rotate during the day if sun glare becomes an issue, or when access behind the screen is necessary. Once the sun has set, the screens typically return to vertical.
Except the port side screen. This 49″ (diagonal measurement) monitor is a touch screen. I have not been a fan of smaller touch screens in the past. They are difficult to use in rough conditions. At this size though the advantage is so large that I have been converted.
The two of us have always worked as a team when conditions get difficult. Linda normally runs the electronics and steers, adjusting radars, chart plotter, and depth sounders as I request or conditions require. My attention is focused outside of the helm, watching the sea for signs of shallows, ice, and other vessels. In the original Matrix layout if I was in the notch against the open window, I could not reach much of the gear.

It seems so simple now, such a logical evolution, so obvious, that the convoluted path required to arrive here doesn’t seem possible. The problem is that we were dealing in an area so new and different, each iteration over that year of experimenting opened our eyes to new possibilities. There were three main goals we had for optimizing our navigation layout and operation:
First, organize the panel so as to minimize operator error. Second, make it possible for either operator to reach all of the gear. And third, reduce to a minimum the number of operations required to adjust navigation data (more on this in a bit).

In the console photo above, there are autopilot steering controls on both aft corners with the shift throttle near center. Left of this is the autopilot control head and to the right the FLIR night vision camera control.
Second row up from the bottom has a pair of SIMRAD OP50 controllers on each edge, each of which operates one of the four SIMRAD CPUs. Centered above the shift/throttle are the external lights control (lower) and bilge pump manual trigger. The two red buttons are emergency stop for the engines. The upper black button is for the horn while the lower black button turns the second helm pump on/off.
The square meter adjacent to the buttons controls the NAIAD stabilizer system. Upper right not shown here but in the preceding photo is the windlass control. Across the aft vertical face are the VHF radio on the left, emergency steering lever on the right. AIS control head is in the middle.

Above: in a tight situation, where time is of the essence, if anything goes wrong with the auto pilot one button push and you are in direct control of the hydraulic pump that steers the boat.

The starboard vertical side has the Matrix deck interior light switches and dimmers. The three trackballs (in storage mode here held in place with Velcro) are used with the video cameras, N2K when presented on a big screen, and in some situations with the SIMRAD gear. The port side has a series of circuit breakers for nav gear in this area.
Eliminating the traditional navigation desk previously installed, and mounting the monitors low made it possible to lower the height of the helm chairs, while maintaining good sight lines forward in close to the bow.

Geometry of the console works really well when one is seated, yet is still high enough to be easily used when standing. And just in case we decide we want it higher or lower, the angle and height can be changed without too much effort.
And now we get to a critical reason for this post. All major integrated navigation systems depend on opening, adjusting and moving between windows to get the most out of their systems. For example, if you have made changes to your chart scale and want to adjust range on the radar, two or three key strokes or button pushes are typically required before you have exited from the charting program and gotten into the radar. This works fine offshore and in benign situations, when time is not a pressure factor. But as your operating space tightens and stress is added to the equation, those extra key strokes required to change windows can lead to problems.
This is why prior to Cochise we avoided integrated electronics systems, opting instead for dedicated stand-alone electronic components. Along with other benefits, this “a la carte” method got rid of window switching issues.

But when Simrad introduced their OP50 controller (above), a lot of things became possible. Cochise had been launched with a SIMRAD system based on a their NSO2 CPU. A feature of this blackbox was twin processor cards–effectively two CPUs in one black box, each driving its own screen, and controllable by the OP40 remote. By adding a second NSO2 processor there were now four CPUs. Marrying these with four dedicated OP50 controllers and four separate screens created an operational environment that was simpler, much quicker to learn, and less subject to errors.
Each critical nav system could have its own screen and its own controller, eliminating the extra operations previously necessary when we wanted to modify displayed data.
If the radar is on the touch screen (screen #1) and we want to change range we need only to turn the control knob on OP50#1. With the chart on screen #2, changing range again is just a twist of OP50#2’s control knob. Previously we’d have to first switch from the radar window to the chart window, and then one or more additional operations could be required depending on what was happening. The f our OP50s can be reached from either helm chair
Sitting comfortably at my land desk, with a three-screen iMac Pro in front of me and a PC with engineering software to my right, operating with five or more programs open at once, switching between windows seems so simple. One would think that a conventional integrated nav system, such as we started out with, would be no big deal. And that is is often the case.
But I can assure you that when the weather and sea combine to make things difficult, when there is risk to vessel and crew, when you are not 100% certain of your position or the next move, the extra key strokes do make a big difference. And when your fingers hit the wrong key and you are momentarily lost, you then have a conflict between the focus required to get back to the right nav data, or keeping your senses tuned to what’s happening outside. This new approach eliminates most of those issues.
Now for a moment of candor. If this were 20 years ago and our physical capabilities were at a higher level, we would be less concerned. Our innate sea sense and finely-tuned situational awareness would go a long way toward keeping us out of trouble. This new approach is a way of compensating for the aging process. It allows us to operate a vessel as large as Cochise on our own, in difficult conditions, which would otherwise not be prudent.
We do not like being dependent on this electronic wizardry, but we prefer it to the alternative of cruising in less invigorating environments.
Finally, a few words on the N2K data system:

It begins with these dedicated Maretron N2K screens. You have a choice of up to 16 pages of data with a few buttons pushed with each device. However, in reality we’ve found that six small screens mounted at the top of the console give us sufficient data space to have the most critical info in front of us at all times. The Maretron N2K data system is separate from and independent of the other systems.
These six screens have lived at various locations on the Matrix deck. We like them best as shown, where they are just under our normal field of view.
There are additional screens at the lower helm, master control panel, in the engine room, and at the lower portable helm station.
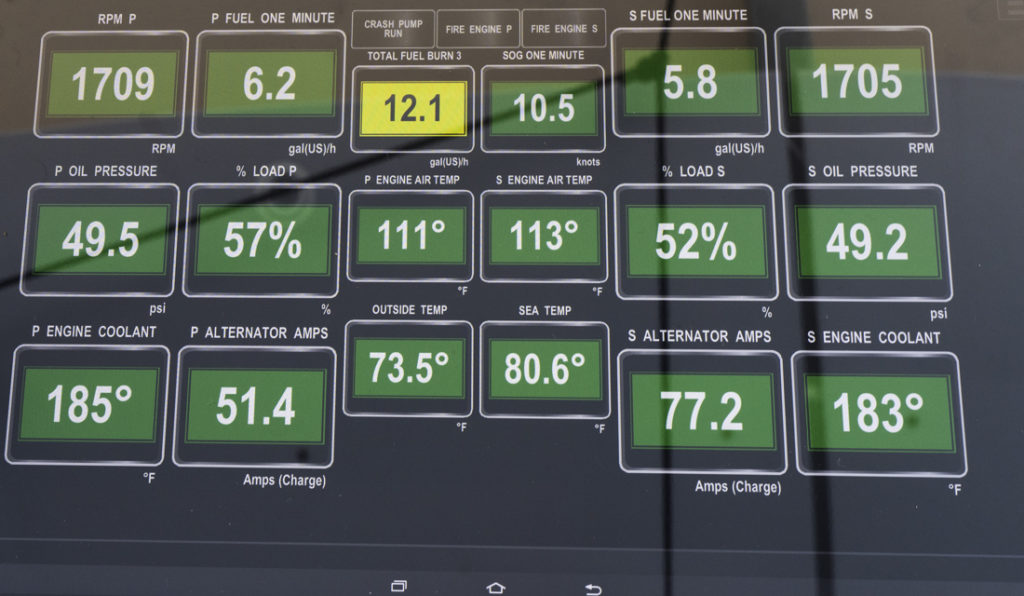
When we are on soundings, and on occasion offshore, all four of the big screens on the Matrix deck are being used for navigation and video, so we have a series of special N2K View pages which we bring up on the various tablets. The photo above shows the diesels working hard in 30 knots of breeze on the nose, while losing .75 knots to adverse current. There are times when two or more tablets are in use.
We have some really cool tools these days, and with these changes they are more reliable and a whole bunch more fun.

Posted by Steve Dashew (August 19, 2020)
August 24th, 2020 at 9:35 pm
great to see you back on deck, missed your updates.
hope you are all well.
August 28th, 2020 at 12:24 pm
Not a response to this post but to the previous one. I have 3 volumes (Practical Seamanship, Surviving the Storm, and Mariner’s Weather) in hard cover, like-new condition, that I would gladly send someone for just the cost of shipping. I live in Bellingham, WA, USA. I would hate to just throw them away.